Collaborative robotics: How to integrate cobots in the workplace
Introduction
Collaborative robotics, or cobots, is a revolutionary advancement in industrial automation that enables harmonious collaboration between humans and machines. These machines operate closely near to humans, responding to their presence and ensuring safety through advanced sensor technology and adaptive control systems. Cobots have gained popularity in various industries due to their ability to address modern manufacturing needs, offering efficiency, flexibility, and cost-effectiveness. They are used in automotive assembly lines, electronics manufacturing, healthcare, agriculture, and logistics. The ease of programming, quick deployment, and adaptability of cobots make them an attractive choice for businesses seeking to streamline operations. Integrating cobots into the workplace can significantly enhance efficiency and productivity, freeing human workers from mundane tasks and allowing them to focus on more complex, creative activities. Additionally, cobots reduce workplace injuries due to their safety features. As cobots continue to evolve, their role in modern industries is set to become increasingly pivotal, reshaping the landscape of automation and collaboration in the workplace.
Robot vs Cobot: the distinction that matters in manufacturing
Cobots and industrial robots differ in manufacturing tasks. Cobots are human powered, enhancing efficiency and productivity through strength, power, precision, and data. They assist employees and automate mundane tasks, while industrial robots require complex reprogramming and are often used in heavy-duty manufacturing. Industrial robots may work in assembly in the automotive industry.
| Aspect | Cobots | Industrial robots |
|---|---|---|
| Operation with humans | Designed for safe collaboration with humans | Typically operate in restricted areas, separate from humans |
| Safety | Equipped with sensors and force-limiting mechanisms for safe interaction with humans | Require safety barriers or cages for human protection |
| Payload | Usually have lower payload capacities, often ranging from 1 kg to 20 kg | Higher payload capacities, commonly ranging from 50 kg to over 1000 kg |
| Flexibility | Easily reprogrammable and adaptable to various tasks and environments | Less flexible and usually designed for specific tasks |
| Programming | Intuitive programming interfaces for easy setup and operation | Require specialized programming skills for operation and customization |
| Programming | Intuitive programming interfaces for easy setup and operation | Require specialized programming skills for operation and customization |
| Cost | Generally, more affordable upfront costs | Higher initial investment due to complexity and customization |
| Space | Smaller footprint, suitable for limited spaces | Larger footprint, may require more space |
| Efficiency | Lower speed and throughput compared to industrial robots | Higher speed and efficiency in repetitive tasks |
| Integration with systems | Often designed for quick integration into existing systems | Require tailored integration and setup |
| Maintenance | Typically, easier to maintain and troubleshoot | Require specialized maintenance and regular servicing |
| Advantages | Safe collaboration with humans., Flexibility in tasks., Lower initial costs, Easy programming, and setup | Higher payload capacity, Faster speed, and efficiency, Well-suited for repetitive tasks |
| Disadvantages | Lower speed and throughput, Limited payload capacity, less suitable for heavy-duty tasks., May not be as efficient for high-volume production | Require safety measures for human interaction, Higher initial investment, less adaptable to change in tasks |
| Applications | Assembly, ispection, material handling, welding, healthcare, logistics | Welding, painting, material handling, machining, packaging, palletizing, foundry |
Table 1: Comparison of industrial robots and cobots benefits
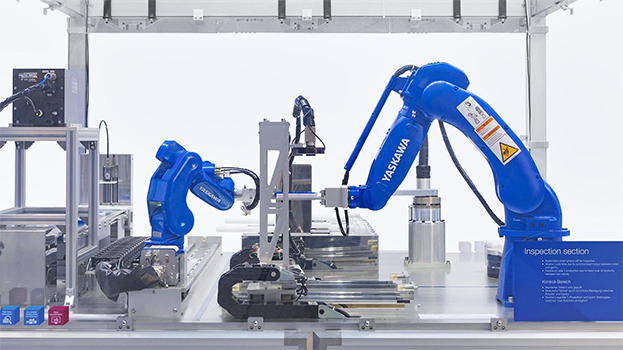
Figure 1: Industrial robot(Image source)

Figure 2: Cobot working with human(Image source)
Why to integrate cobots in workplace
Integrating collaborative robots (cobots) in the workplace offers numerous advantages over traditional industrial robots. Some of the key benefits include:
- Enhanced collaboration: Cobots can work alongside human employees, facilitating a safer and more collaborative work environment.
- Increased flexibility: They are easily programmable and can adapt to different tasks and processes, enabling more flexible production lines.
- Cost-effectiveness: Cobots are typically more affordable than traditional industrial robots, making automation accessible to smaller businesses and startups.
- Space efficiency: Their compact size and ability to work in close proximity to humans allow for optimal utilization of workspace and resources.
- Quick setup: Cobots are designed for easy integration and require minimal programming, leading to reduced setup time and increased operational efficiency.
- Improved productivity: By automating repetitive and mundane tasks, cobots can significantly enhance overall productivity and output levels.
- Enhanced safety features: Built-in safety sensors and features enable cobots to detect human presence and minimize the risk of accidents, ensuring a safer work environment.
- Easy reprogramming: Cobots can be quickly reprogrammed to perform different tasks, enabling businesses to adapt to changing production needs and market demands.
- Reduced employee fatigue: By handling physically demanding or monotonous tasks, cobots can help reduce employee fatigue and the risk of work-related injuries.
- Scalability: They allow for easy scalability, enabling businesses to adjust their automation levels as their production needs evolve without significant reconfiguration or additional investments.
| Aspect | Power and force limiting | Safety monitored stop | Speed and separation | Hand guiding |
|---|---|---|---|---|
| ISO Classification | Compliant with ISO 10218 | Compliant with ISO 10218 | Compliant with ISO 10218 | Compliant with ISO 10218 |
| Operational safety features | Force-torque sensors in joints | Safety sensors for human presence | Vision systems for zone monitoring | Hand-guided programming |
| Safety measures | Rounded contours, no sharp edges | Stops upon human presence | Speed reduction & full stop based on zones | Direct operator control |
| Sensor technology | Joint Sensing, Skin Sensing, Force Sensor Base | Safety sensors | Vision systems | Hand-guided control |
| Ideal for applications in | Manufacturing, repetitive tasks | Co-working spaces, safety zones | Picking, packing, sorting | Job shops, welding, inspection |
| Complexity | Moderate to High complexity | Moderate complexity | Moderate complexity | Low complexity |
| Common applications | Ergonomically challenging tasks, safety-oriented manufacturing | Minimal human-robot interaction | Sorting, packaging | Low-volume, adaptable tasks |
Table 1: Comparison table different types of Cobot
And here are some additional technical specifications that might vary across different cobot models:
| Technical specifications | Power and force limiting | Safety monitored stop | Speed and separation | Hand guiding |
|---|---|---|---|---|
| Control system | Integrated safety systems | Safety sensors, control unit | Vision-based control system | Operator interface, control unit |
| Degrees of freedom | Varies | Varies | Varies | Varies |
| Payload capacity | Typically, lower | Moderate | Moderate to high | Varies |
| Reach | Varies | Varies | Varies | Varies |
| Programming Interface | User-friendly programming interfaces | Safety stop mechanisms | Vision-based programming | Manual hand-guided programming |
| Accuracy | Precise movements | Controlled stopping accuracy | Vision-guided precision | Operator-controlled precision |
| Collaborative Features | Collaborative workspace design, safety-rated hardware | Pause and resume functionality | SDynamic speed adjustment | Direct operator interaction |
Table 2: Technical specification of different types of cobot
These specifications can significantly differ among cobot models and manufacturers. They're tailored to suit specific industrial requirements, emphasizing safety, functionality, and operational adaptability in various work environments.
Parts of Cobots
Collaborative robots, or cobots, consist of several components that work together to enable their functionality. Each component plays a crucial role in the robot's operation. Here are the main parts of a cobot along with example products and their specifications, features, functions, and applications:
1. Robotic arm: A robotic arm is a crucial component of a cobot, responsible for tasks like picking, placing, assembling, and manipulating objects. It typically consists of multiple segments, joints, actuators, and end-effectors. The FESTO 8083931 DC Linear Actuator is a compact, precise stepper motor that converts rotational motion into linear motion. Its 35mm size makes it suitable for limited space requirements. The actuator operates at 24 VDC with a current rating of 5.3 A. While not a complete robotic arm, it can be integrated into the arm as a segment or joint, facilitating joint movement, end-effector adjustment, or serving specific tasks like positioning, gripping, or orienting objects.
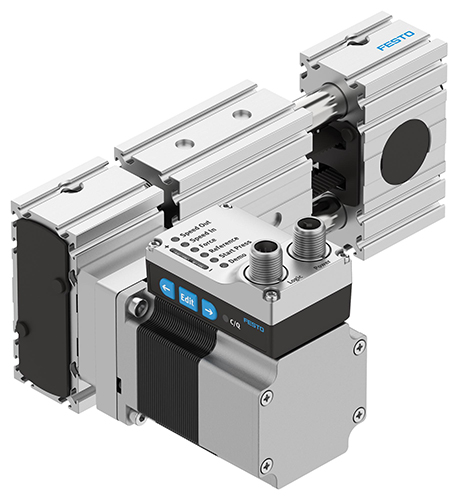
Figure 3: FESTO 8083931-DC Linear Actuator ELGE Gantry Axis Series(Image source)
2. End-Effector or Gripper: Cobot grippers are versatile tools used in various industries, including transporting hazardous items, small, breakable objects, and delicate items. Magnetic grippers can lift metal items, while vacuum grippers use suction to move cumbersome or oddly shaped items. Soft robotics cobot grippers are gentle enough to be used in production lines with fragile components or products.
Here's a detailed comparison of various types of robotic grippers available for cobots, including their features, functionalities, specifications, and real-world applications, along with a corresponding product from Festo for each gripper type:
| Type of grippe | Features | Functionalities | Specifications | Real-world applications | Festo product example |
|---|---|---|---|---|---|
| Parallel grippers | Two opposing jaws moving in parallel | Versatile for various object sizes, simple design | Jaw opening: 0-100mm, gripping force: 5-1000N, Material: Aluminum/Steel, Weight: Varies, Size: Varies | Pick-and-place, assembly, packaging, material handling | Festo DHPS Gripper Series |
| Vacuum grippers | Suction cups for gripping | Secure handling of smooth/flat objects, quick attachment | Suction cup size: Varies, Vacuum strength: Varies, Material: Various, Weight: Varies, Size: Varies | Packaging, logistics, handling flat/slippery items | Festo VAS Vacuum Generators & Components |
| Adaptive grippers | Flexible, adaptive fingers | Conform to various object shapes, gentle handling | Material: Elastomers/Soft compounds, Flexibility: High, Range of object sizes: Varies | Handling fragile or irregularly shaped items | Festo Adaptive Gripper Fingers |
| Magnetic Grippers | Utilize magnets for grip | Strong grip on ferromagnetic objects | Magnetic strength: varies, compatibility with materials: Ferrous metals, Weight: Varies | Metal handling, assembly, manufacturing | Not available (Festo doesn't offer a specific magnetic gripper) |
Table 3: Types of Cobot grippers

Figure 4: Soft material handling gripper(Image source)
The technologies and gripper systems are highly adaptable and customized to meet specific industry needs, considering factors like object fragility, weight, shape, and production requirements in collaborative robot environments. The below given table provides a comprehensive overview of the technology used in various grippers for handling various materials.
| Technology | Algorithms | Hardware | Application | Examples of grippers |
|---|---|---|---|---|
| Force/Torque Sensing | PID, Kalman filters, impedance control algorithms | Load cells, strain gauges, force/torque sensors | Enable grippers to detect applied forces and torques, allowing dynamic adjustment of grip strength based on sensed data, ensuring delicate handling | Robotiq Grippers, ATI, OptoForce, FUTEK |
| Compliant mechanisms | Finite element analysis (FEA), kinematics modeling | Soft robotic materials, 3D printing | Gripper designs employ soft, flexible materials or structures that adapt to delicate object shapes, minimizing the risk of damage during handling | Soft Robotics' mGrip Series, BioTac, GelSight |
| Advanced Control Algorithms | Model predictive control (MPC), adaptive control, neural networks | High-performance processors, microcontrollers | Algorithms govern grip force and manipulation, adjusting parameters based on sensor feedback for delicate handling of fragile objects and firm grip on heavy items | Schunk grippers, onRobot grippers, zimmer group grippers |
| Material science in gripper design | Computational material science methods | Specialized gripper materials (carbon fiber composites, polymers) | Gripper designs use tailored materials with properties like strength, flexibility, and low friction to handle both delicate and heavy items efficiently | Zimmer group grippers, piab flexible grippers |
Table 4: grippers for handling various materials
3. Sensors: Vision systems in collaborative robots (cobots) refer to the integration of cameras and sensors that enable these robots to perceive and understand their environment. These systems enhance cobots' capabilities by providing visual feedback, enabling tasks such as object detection, recognition, localization, and quality inspection.
There are several types of vision systems and sensors commonly used in cobots:
1. 2D Cameras:- Example: Cognex in-sight 2000 series
- Technical specifications:
- Resolution: 800x600 pixels
- Frame rate: Up to 60 fps
- Communication: ethernet/IP, profinet, TCP/IP
- Features & functionalities: Offers pattern recognition, part positioning, barcode reading, and defect detection.
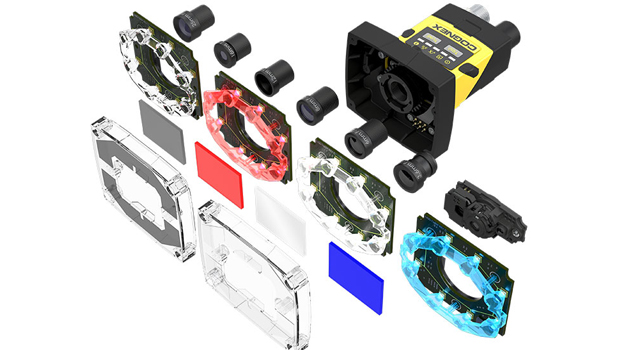
Figure 5: Cognex in-sight 2000 series vision sensor(Image source)
2. 3D Cameras:- Example: Ensenso XR Series
- Technical specifications:
- Technology: Stereo vision
- Resolution: Varies (e.g., 1280x1024 pixels)
- Frame Rate: Up to 30 fps
- Communication: GigE Vision
- Features & Functionalities: Provides 3D point clouds, depth information for object localization, shape recognition, and volume measurement.

Figure 6: Ensenso XR Series 3D camera(Image source)
3. Laser Sensors:- Example: Keyence LJ-V Series
- Technical Specifications:
- Measurement Range: Up to several meters
- Accuracy: Sub-millimeter precision
- Communication: Ethernet/IP, Profinet
- Features & Functionalities: Offers precise distance measurement, object profiling, and surface inspection.

Figure 7: High Speed Keyence LJ-V Series Laser sensor(Image source)
4. RGB-D Sensors:- Example: Intel RealSense D455
- Technical specifications:
- Technology: Depth and RGB camera combined
- Resolution: 1280x720 pixels (RGB), up to 640x480 pixels (depth)
- Frame Rate: Up to 90 fps (RGB), up to 90 fps (depth)
- Features & functionalities: Provides color and depth information simultaneously, suitable for gesture recognition, object tracking, and augmented reality applications.

Figure 8: Intel RealSense Depth Camera D435(Image source)
5. Infrared Sensors:- Example: SICK Ranger E
- Technical specifications:
- Range: Several meters
- Accuracy: Millimeter-level precision
- Communication: Ethernet/IP, Profinet
- Features & functionalities: Detects objects even in challenging lighting conditions, suitable for distance measurement, collision avoidance, and navigation.

Figure 9: SICK Ranger-E40414(Image source)
6. Safety Scanner Sensor:- Product example: Pilz PSENscan Safety Laser Scanner
- Technical specifications: Safety-rated, configurable warning and safety fields, certified according to safety standards.
- Features: Real-time monitoring, safe zone detection, quick response to hazards.
- Functions: Ensures safe operation around humans, stops or slows down the robot in case of detected hazards.
- Applications: Collaborative robotics, safety-critical environments.

Figure 10: Pilz PSENscan Safety Laser Scanner(Image source)
Each of these sensors has its own technical specifications and features, tailored for different applications within cobots. For instance, 2D cameras excel in tasks like part identification, barcode reading, and surface inspection, while 3D cameras provide depth information crucial for bin picking, assembly verification, and more complex manipulation tasks. Laser sensors, RGB-D sensors, and infrared sensors offer their own unique capabilities suited for diverse industrial applications, enhancing the cobots' ability to interact with their environment safely and efficiently.
4. Cobot Controller: The Omron SmartController EX is a sophisticated and compact controller specifically designed for controlling up to four robots in a collaborative environment. It boasts several technical specifications, features, and functionalities that contribute to its versatility and efficiency in managing cobots.

Figure 11: Omron SmartController EX(Image source)
| Specifications | Details |
|---|---|
| Dimensions & Weight | 86 x 187 x 329 mm; 2.6 kg |
| Power Supply | 24 VDC ±10%; 5 A current consumption; 120 W power consumption |
| Operating Environment | 5 to 40°C ambient temperature; 5 to 90% humidity (non-condensing) |
| Mounting Options | Panel mount, rack mount, stack mount, desktop configurations |
| Communication Ports | RS-232 (115 kbps), RS422/485, Gigabit Ethernet, DeviceNet |
| On-board I/O | 12 inputs, 8 outputs |
| Conveyor Tracking Input | 4 inputs for synchronizing robot movements with conveyor systems |
| Features & Functionalities | |
| High Footprint Efficiency | Compact design optimized for space utilization without compromising performance; |
| Integration with ACE Software | Integration with ACE configuration software for streamlined cobot task setup and management |
| Key Features | Robust hardware, advanced algorithms, real-time processing, AI integration |
| Suitability | Various industrial automation applications; efficient control & coordination of multiple robots |
Table 3 : Omron SmartController EX Technical Specification
The Omron SmartController EX is a robust, user-friendly robot that offers advanced algorithms, real-time processing, and AI integration. Its robust hardware, versatile connectivity options, and user-friendly software make it suitable for various industrial automation applications, enabling efficient control and coordination of multiple robots.
5. Motors: Motors play a fundamental role in the functionality of the robotic arm in a cobot. They are responsible for providing the necessary power and motion to move the various joints and links of the arm. Different types of motors may be used in cobots, depending on the design and requirements:
a. Electric Motors: Electric motors are commonly used in robotic arms due to their controllability, precision, and efficiency. Types of electric motors include:
- DC Motors: These motors convert electrical energy into rotational motion. They are often used for simpler applications in cobots due to their straightforward control and cost-effectiveness.
- Brushless DC Motors (BLDC): BLDC motors offer higher efficiency and reliability compared to traditional brushed DC motors. They are often preferred for more demanding applications in cobots due to their durability and better control.
- Stepper Motors: Stepper motors move in precise increments, allowing for accurate control of position and speed. They are commonly used in cobots for applications that require precise movements, such as in pick-and-place tasks.
b. Servo Motors: Servo motors are highly precise and offer better control over position, speed, and torque. They contain built-in feedback mechanisms (encoders) that enable accurate positioning and movement control. Cobots often use servo motors in joints where precise control and accuracy are crucial.
The motors in a robotic arm are connected to the joints and links, enabling the arm to move in various directions and perform tasks. The control system of the cobot sends signals to these motors, commanding them to rotate or move to specific positions or angles.
Additionally, motors may work in conjunction with gear systems to increase torque or reduce speed, ensuring the arm can handle various payloads and perform tasks with the necessary force or delicacy.
The proper selection and control of motors are essential in cobots to ensure smooth, accurate, and safe operation. The motors allow the robotic arm to execute programmed tasks, interact with its environment, and collaborate safely with humans in shared workspaces.

Figure 12: Trinamic / Analog Devices - Stepper Motor(Image source)
The TRINAMIC / ANALOG DEVICES PD28-3-1021-TMCL stepper motor is a crucial component in cobots, offering high precision and control due to its stepwise motion. Its compact size allows easy integration into cobot structures, while its bipolar configurations provide precise control. The 12 N-cm holding torque ensures stability and accuracy in cobot operations. The motor's 670 mA current rating optimizes performance and prevents overheating or damage. Its single shaft design simplifies assembly and reduces assembly complexity, making it easier to integrate into cobots.
6. End of Arm Tooling (EOAT):- Refers to the equipment attached to the robot's arm for performing specific tasks.
- Includes various tools such as suction cups, welding tools, and cutting devices.
- Enhances the robot's capabilities for handling different materials and completing diverse tasks.
| EOAT Type | Technical Specifications | Features | Functionalities | Applications | Advantages |
|---|---|---|---|---|---|
| Grippers | - Material: Aluminum, steel, etc. Actuation: Pneumatic, electric Grip Force: Variable Size: Customizable | - Flexibility in grip strength Adjustable sizing Compatibility with various shapes Quick and precise handling | - Pick-and-place tasks Assembly operations Packaging | - Versatility Precise handling | - Limited grip on irregular shapes Requires accurate alignment |
| Vacuum Cups | - Material: Silicone, rubber Diameter: Various sizes available Vacuum Level: Adjustable Configuration: Suction cups, bellows cups | - Adaptable to different surfaces Quick attachment/detachment Good for fragile objects | - Pick-and-place of flat or curved objects Palletizing tasks | - Gentle handling of delicate items Easy maintenance | - Ineffective on porous or rough surfaces Susceptible to leaks |
| Tool Changers | - Material: Steel, aluminum Payload Capacity: Variable Compatibility: Multiple tool types Actuation: Mechanical, pneumatic, magnetic | - Swift tool swapping Supports various tools Increased efficiency | - Switching between grippers, sensors, etc. Adaptability to different tasks | - Enhances productivity Reduced downtime | - Initial investment cost Complexity in integration |
| Sensors | - Types: Proximity, vision, force/torque Range: Variable Accuracy: High precision Connectivity: Wired/Wireless | - Precision in measurements Real-time feedback Enhanced safety | - Object detection Quality control Force sensing | - Improved accuracy Prevents collisions | - Costly depending on sensor type Calibration requirements |
| Cameras | - Resolution: High-definition Field of View: Wide angle Frame Rate: Adjustable Connectivity: USB, Ethernet | - Visual inspection Object recognition Image analysis | - Quality control Pick-and-place tasks Navigation | - High accuracy in object recognition Improved precision | - Vulnerable to environmental conditions Processing speed limitations |
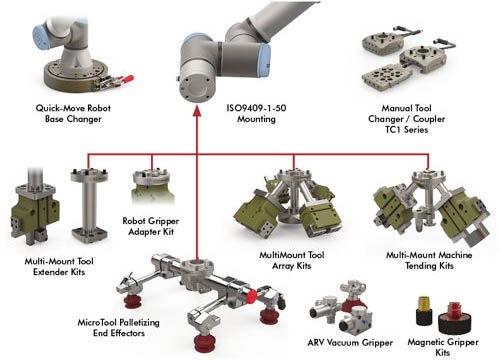
Figure 13: Different types of EOAT(Image source)
4. Software: Cobot programming software, like UR Software,ABB and Intera Software, is designed to help program and control collaborative robots. These platforms use graphical interfaces, allowing users to program cobots with ease. They offer features like waypoint programming and teach-by-demonstration capabilities, and safety features like collision detection and force-limiting technology. They support various communication protocols and are compatible with different operating systems, multiple robot models, and regular updates. They also offer simulation environments for offline programming, reducing downtime and enabling testing of new tasks before deployment.
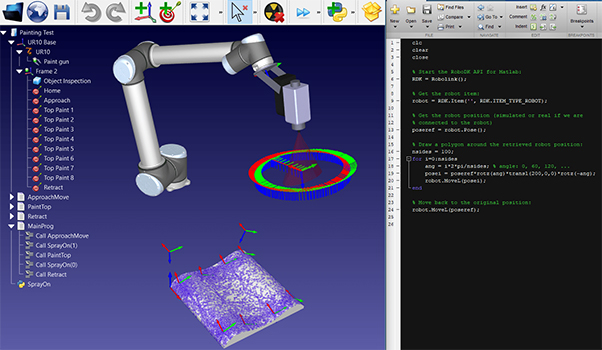
Figure 14: Cobot Programming Software(Image source)
| Manufacturer | Software/Product | Key Features |
|---|---|---|
| Universal Robots (UR) | UR Polyscope |
|
| FANUC | FANUC ROBOGUIDE |
|
| KUKA | KUKA Sunrise. Workbench |
|
Case Studies: Successful Cobots Integration
Example 1: Automotive Industry - Cobots in Assembly LinesIn the automotive industry, Cobots have been successfully integrated into assembly lines to work alongside human workers. These Cobots are equipped with precision and speed, making them ideal for tasks like spot welding, fastening, and material handling. They are often programmed with high repeatability and accuracy, ensuring the consistent quality of assembled components. These Cobots use advanced vision systems and sensors to adapt to changes in the manufacturing process and collaborate safely with human workers. They can also be equipped with end-effectors tailored to specific tasks, such as grippers for handling car parts or torque sensors for precise fastening. The seamless integration of Cobots in the automotive sector has led to increased productivity, reduced ergonomic strain on workers, and improved product quality.

Figure 15 :Cobots in Assembly Line(Image source)
Example 2: Healthcare Sector - Cobots Assisting in Repetitive TasksIn the healthcare sector, Cobots are employed to assist with repetitive and physically demanding tasks. These tasks may include patient lifting, medication delivery, or specimen transportation. Cobots are designed to ensure the safety and well-being of patients and healthcare professionals. They are equipped with sensitive force and torque sensors to handle delicate tasks like patient care. Moreover, they can be programmed to work in close proximity to humans, adapting their movements based on human interactions. The integration of Cobots in healthcare settings involves extensive training and programming to meet stringent safety and hygiene standards. The successful deployment of Cobots in healthcare has led to reduced physical strain on healthcare staff, improved patient care, and enhanced operational efficiency.

Figure 16: Cobot in Medical Sector(Image source)
Example 3: Logistics and Warehousing - Cobots for Order Picking and Inventory ManagementIn logistics and warehousing, Cobots are employed to optimize order picking and inventory management. These Cobots are equipped with advanced vision systems and navigation technologies, allowing them to efficiently navigate complex warehouse environments. They can identify and pick items from shelves, transport them to packing stations, and manage inventory levels. Integration with warehouse management systems (WMS) and inventory control software enables real-time tracking and efficient order fulfillment. The success of Cobots in logistics and warehousing hinges on their ability to adapt to changing order volumes and inventory layouts. These robotic systems also play a vital role in reducing errors in order fulfillment, improving inventory accuracy, and increasing the overall efficiency of supply chain operations.
These case studies highlight how Cobots, through their technical capabilities and collaborative features, have been integrated successfully in diverse industries to enhance productivity, reduce physical strain, and improve overall operational efficiency. In each case, the choice of Cobots, their programming, and safety measures are critical technical factors that contribute to their successful integration.

Figure 17 :Cobots on Warehouse(Image source)
Advantages of cobots in Manufacturing
Collaborative robots in manufacturing offer numerous benefits, including enhanced quality control, streamlined operational efficiency, and increased production output. They can be implemented remotely, allowing for more flexibility and adaptability. AI also enhances employee safety by assuming responsibility for less desirable tasks. Cobots are particularly beneficial for small and medium-sized enterprises (SMEs) due to their cost-effectiveness and ability to enhance human labor. Overall, cobots offer significant advantages in the manufacturing industry.
Disadvantages of cobots in manufacturing
Collaborative robots in the manufacturing industry have limitations due to their operational capabilities and their suitability for specific business contexts. They are not designed for high-intensity manufacturing tasks and heavy lifting operations. Additionally, cobots are not fully automated. However, these attributes are advantageous in factory environments where human workers need assistance. Cobots have limitations in cognitive and finesse tasks, but with technological advancements, they are expected to address these limitations through skilled engineers and developers.
Safety Standards of Collaborative Robots
The RIA ISO/TS 15066 technical specifications and ISO 10218 safety standards provide guidance on the safety performance and functions of collaborative robots. The 2016 RIA TR15.606-2016 Cobots document outlines safety needs for robot systems and collaborative robots, while the RIA TR15.806-2018 Guidance to Testing Force and Pressure in Collaborative Robot Application provides guidelines for measuring forces and pressures in transient and quasi-static contact actions.
Future of Cobots in the Manufacturing Industry
Advancements in technology will lead to more sophisticated cobots capable of handling a wider range of tasks. Integrating artificial intelligence and machine learning will enhance cobots' efficiency and adaptability. Early adopters will have a competitive advantage, focusing on productivity and product quality. Collaborative robots are transforming the manufacturing industry, offering benefits for businesses, workers, and the economy. They will enhance efficiency and growth opportunities.
Conclusion
Collaborative robotics (cobots) have gained momentum in the manufacturing industry, enabling small and medium businesses to streamline tasks and increase productivity. The ease of use and flexibility of cobots make them an attractive option for manufacturers. Traditional industrial robot makers offer cobot options, but it's crucial to weigh the pros and cons, financial investment, and company needs before investing. A clear implementation strategy and current limitations are essential for optimal performance. Cobots will continue to be workers' extensions and industrial robots' companions, and as productions become more digital and automated, they will bring more value if employed adequately. As productions become more automated, it's essential to employ cobots appropriately for optimal performance.






